try:
while True:
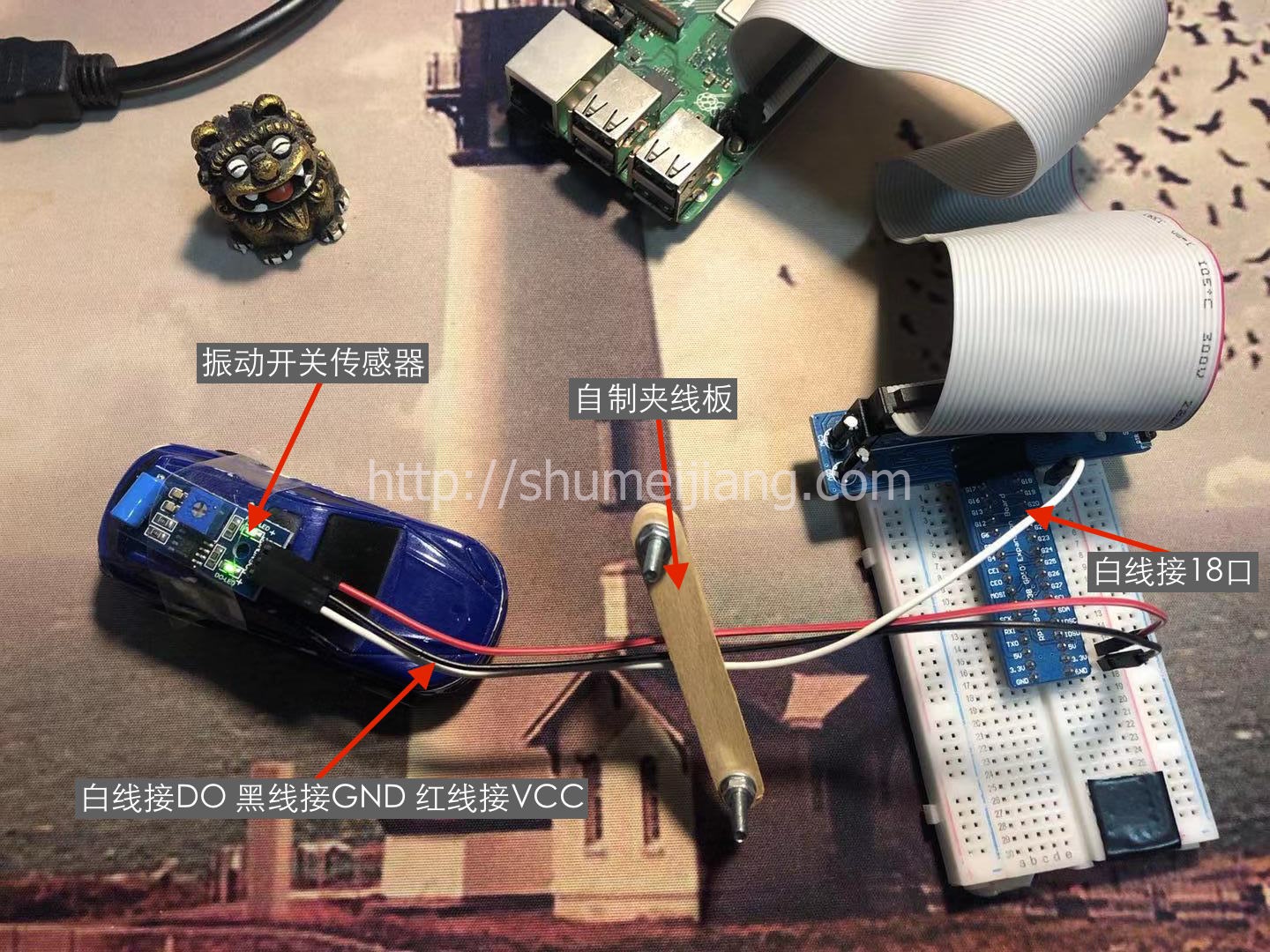
status = GPIO.input(uPin)
if status == 1: ##高电平说明有振动
print '路面不平'
elif status == 0:
print '==='
time.sleep(0.3) ##检测频率 可调节
except KeyboardInterrupt:
pass
n = 1
moment = int(raw_input('老狼 老狼几点了:')) ##接收问询输入
if moment > 12: moment = 12 ##12点老狼就要来了
try:
while True:
if n > moment: break
print n
GPIO.output(soundPin, GPIO.LOW) ##输出低电平 然后传感器发出声音
time.sleep(0.15) ##声音输出时间
GPIO.output(soundPin, GPIO.HIGH) ##输出高电平 然后声音输出终止
time.sleep(0.15) ##声音中断时间
n += 1
p = GPIO.PWM(18, 50) ##初始化18号引脚 并设置输出频率为50Hz
p.start(0) ##启动PWM 并设置频率为0 目的是为下面的渐变为铺垫
try:
while True:
for dy in range(0, 100, 5): ##以5为单位从0到100递加
p.ChangeDutyCycle(dy) ##更改占空比 更改高电平的占比 也就是通电时间 看到的效果是逐渐变亮
time.sleep(0.075) ##保持时间
for dy in range(100, 0, -5): ##以-5为单位从100到0递减
p.ChangeDutyCycle(dy) ##同上 通电时间由大变小 看到的效果是逐渐变暗
time.sleep(0.075)
except KeyboardInterrupt: ##如果遇到Ctrl+C 则跳出循环
pass